A photoresistor changes its resistance depending on how much light is falling on it. In the dark, its resistance can be 100K ohm or more; in light, it can decrease to 5K or less.
We will be reading the voltage on pin A0, using the analogRead function.
// the setup routine runs once when you press reset:
voidsetup(){
// initialize serial communication at 9600 bits per second:
Serial.begin(9600);
}
// the loop routine runs over and over again forever:
voidloop(){
// read the input on analog pin 0:
int sensorValue = analogRead(A0);
// Convert the analog reading (which goes from 0 - 1023) to a voltage (0 - 5V):
float voltage = sensorValue * (5.0 / 1023.0);
// print out the value you read:
Serial.println(voltage);
}
Use the Serial Monitor to see the output voltage. Make sure the Baud Rate is the same as in the sketch(typically 9600).
// the setup function runs once when you press reset or power the board
voidsetup(){
// initialize digital pin LED_BUILTIN as an output.
pinMode(LED_BUILTIN, OUTPUT);
}
// the loop function runs over and over again forever
voidloop(){
digitalWrite(LED_BUILTIN, HIGH); // turn the LED on (HIGH is the voltage level)
delay(1000); // wait for a second
digitalWrite(LED_BUILTIN, LOW); // turn the LED off by making the voltage LOW
delay(1000); // wait for a second
}
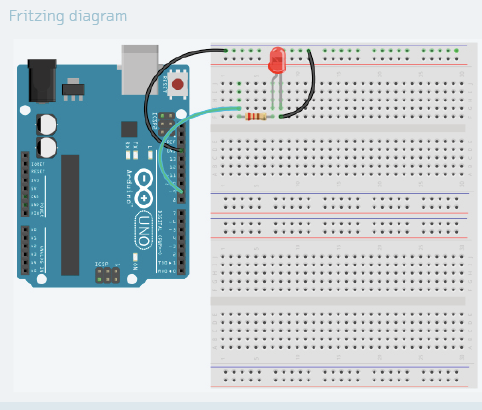
In setup, we define the built-in LED(Pin 13) as an Output. You could assign another pin (2-12) as an output as well.
The check mark verifies that the code is grammatically correct, such as all statements end with semicolons, all functions are enc,osed in curly brackets {. }. the right arrow uploads it to the board. Make sure you select the correct board and port.
Try changing the delay times in the code! Then change pin numbers!


 ,
,










